Was sind überhaupt UTM und SORA?
Die Vorstellung voll automatisiert fliegender Drohnen (UAVs) ist eine reizvolle Vision, vor allem wenn man an die vielen Einsatzmöglichkeiten dieser fliegenden Werkzeuge denkt. Um diese Vorstellung Realität werden zu lassen, werden ein kontrollierter Luftraum sowie digitalisierte Genehmigungsprozesse, inklusive einer Risikobewertung, benötigt. Die Herausforderung für ein solches System ist eine technische Infrastruktur und ein Ökosystem, welches eine Software-basierte Kontrolle von Drohneneinsätzen im Low Altitude Airspace ermöglicht. Im Rahmen der Entwicklung eines UAS (Unmanned Aircraft Systems) Traffic Management (UTM) werden sich u.a. folgende Bereiche herausbilden:
- die Identifizierung neuer Dienstleistungen;
- die Klärung von Rollen und Verantwortlichkeiten;
- die Festlegung von Schnittstellen, Protokollen und Standards sowie
- die Definition von Performance Voraussetzungen.
Es bildet sich hierbei ein System der Systeme heraus, welches interkonnektiv sein muss und nicht als zentrale Datenplattform angelegt ist. Es handelt sich hierbei um ein Konzept, mit dessen Hilfe Drohnen in den Luftraum integriert und Risiken vermieden werden. Eine finale Definition eines UTM ist jedoch zum aktuellen Zeitpunkt nicht möglich.
Um Regeln für die Bewertung des Risikos von Drone-Operations festzulegen, sollte ein künftiges UTM auch SORA-kompatibel sein. SORA (Specific Operations Risk Assessment) ist eine Methode zur Risikobewertung von UAS Einsätzen. Sie ist geeignet für Behörden sowie Betreiber von UAVs und leitet sich aus dem Holistic Risk Model (HRM) ab. Auf Basis dessen werden außerdem die Genehmigungsprozesse erfolgen. Im Oktober 2017 wurden die Allgemeinen Grundsätze in der NfL 1-1163-17 niedergeschrieben. Erstmalig wurde für die Genehmigung einer Aufstiegserlaubnis die Risikobewertung gemäß SORA-GER zur Bedingung. Dabei berechnet man die Bodenrisikoklasse (GRC), und die Luftrisikoklasse (ARC).
Use Case – Herausforderungen in einem realen Szenario
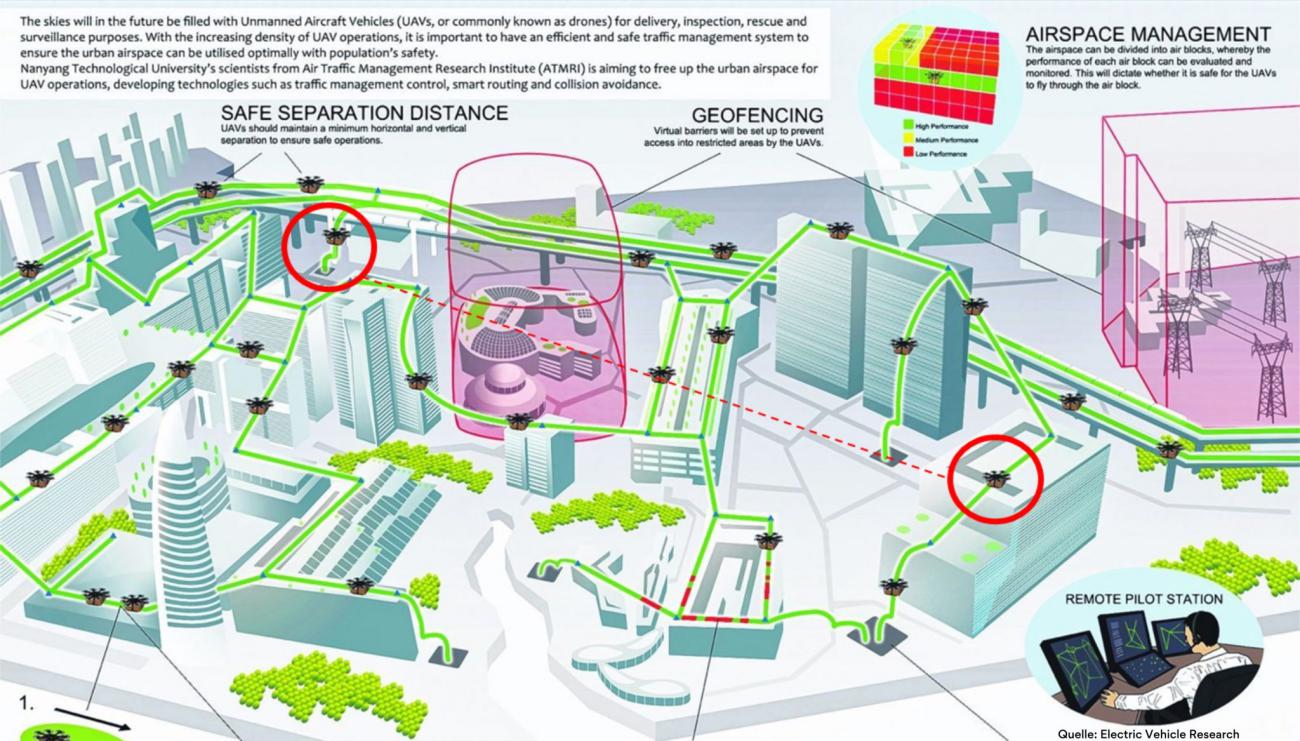
Um die Anforderungen an ein SORA-kompatibles UTM besser zu verstehen, wird das Beispiel eines Gewebetransports per Drohne im urbanen Raum dargestellt. Derzeit wird in der Stadt Hamburg in einem Projekt der Gewebetransport zwischen Krankenhäusern geplant. Im Bild dargestellt sieht man einen fiktiven Luftraum, in dem eine Drohne zwischen zwei Objekten fliegen soll (rote Kreise). Eine direkte Flugroute ist aufgrund von Auflagen nicht möglich. Das bedeutet, dass Drohnen ähnlich wie Fahrzeuge am Boden nur bestimmte Routen fliegen können. Dafür sind Technologien notwendig, die eine Kommunikation zwischen Drohne und dem Leitstand, der die Drohneneinsätze steuert und zwischen den Drohnen ermöglicht.
In der Vision wird von einem ortsungebundenen Leitstand das Ziel für die Drohne angegeben. Dem Leitstandführer wird über ein Planungstool die kürzeste Route für die Drohne vorgeschlagen und er bestätigt diese. Im Hintergrund hat die Software dabei sämtliche Flugverbotszonen, Auflagen und Höhenangaben einberechnet, sowie aus einer Datenbank temporäre Flugbeschränkungen, z.B. durch Rettungseinsätze, verarbeitet. In einem Administrations-Center sind der Pilot und die verfügbaren Drohnen mit den jeweiligen Spezifikationen hinterlegt. Das System weiß durch die hinterlegten Daten und den Abgleich mit einer behördlichen Datenbank, dass der Pilot über den entsprechenden Kenntnisnachweis verfügt. Es plant automatisiert die Flugroute und stellt die jeweiligen regulatorischen Auflagen fest. Mit Hilfe von Funkverbindungen und digitalen Netzwerken können die Drohnen auch während des Fluges Informationen und Anweisungen empfangen. Diese werden zum Teil direkt auf dem Gerät prozessiert. Weiterhin wichtig ist eine Kommunikationsmöglichkeit der Drohnen untereinander, damit sich diese mit Hilfe von künstlicher Intelligenz (KI) und einem Mesh-Netzwerk für schnelle Datenübertragung selber koordinieren können. Dem Drone-Operator wird es mit Hilfe des Leitstandsystems möglich sein, die Bewegungen der UAVs in Echtzeit nachvollziehen zu können. Die Luftaufsichtsbehörden und sonstige relevante behördliche Einrichtungen werden die Drohneneinsätze automatisiert überwachen können. Sie werden die Luftraumkoordination über die Eingabe von Flugverbotszonen, Gewichts-, Geschwindigkeits- oder Höhenvorgaben steuern können.
Welche sind die 6 Schlüsseltechnologien für ein funktionales UTM?
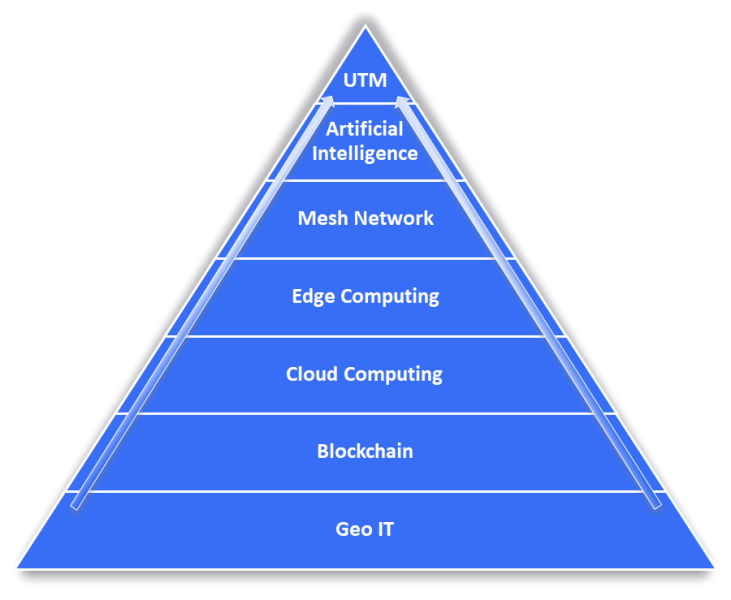
Geo IT
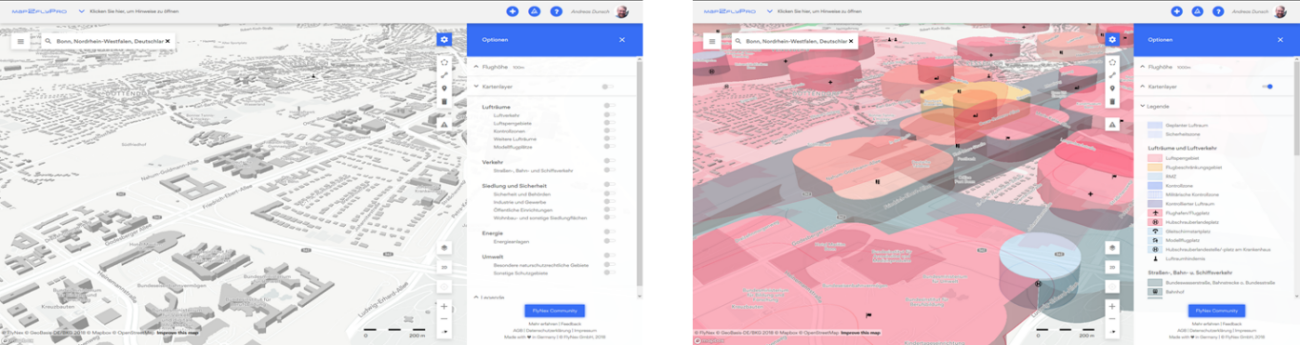
Geo-Informationen sind die Voraussetzung für jeden geplanten Drohnenflug. Vor jedem Flug müssen die Auflagen und Vorschriften für den geplanten Luftraum geprüft und validiert werden. Da sich Drohnen im Gegensatz zum klassischen Luftverkehr oft im bodennahen Luftraum (bis 500ft) aufhalten, ergeben sich spezielle Vorschriften aufgrund bodengebundener Infrastruktur. Die im Bild dargestellte Karte von FlyNex zeigt die Auflagen, die aufgrund der jeweiligen örtlichen Begebenheiten bestehen. Die Daten der bodengebundenen Infrastruktur machen 90% der Einflussfaktoren für einen Drohnenflug bis 500ft aus. Das bedeutet, dass eine große Menge an Daten verarbeitet und aktualisiert werden muss. Die Firma FlyNex aktualisiert ihr Kartenmaterial täglich, um den Nutzern so aktuelle und genaue Informationen wie möglich anzeigen zu können.
Diese umfassenden Geo-Informationen sind ebenfalls notwendig, um eine SORA-Berechnung durchführen zu können. Anschließend wird daraus die Risikoklasse des Einsatzes festlegt. Für die Bestimmung der Ground Risk Class (GRC) ist zum einen die Existenz und zum anderen die Validität der Daten eine wichtige Voraussetzung. Die Geo-Informationen müssen daher sorgfältig mit Attributen und Metadaten hinterlegt werden.
Blockchain
Wie eingangs beschrieben, wird ein künftiges UTM ein System der Systeme sein. Es werden viele Systeme und unterschiedliche Marktteilnehmer und Behörden auch über Ländergrenzen hinweg zusammenarbeiten müssen. Derzeit versuchen viele Marktakteure in einem zentralisierten Ansatz andere Marktteilnehmer an ihre individuellen Lösungen anzuschließen. Aufgrund der Vielzahl der Teilnehmer an einem solchen System und deren unterschiedlichen Interessen wird voraussichtlich niemand seine Datenhoheit an eine Firma oder ein Firmenkonsortium abgeben.
Das System einer Blockchain greift genau dieses Problem auf. Vielen ist die Blockchain-Technologie nur von Kryptowährungen bekannt. Dabei gibt es unheimlich viele weitere Anwendungsfälle. Über das dezentrale Netzwerk können nachverfolgbare und nicht-veränderbare Transaktionen durchgeführt werden. Das bedeutet, die Blockchain-Technologie schafft die Voraussetzung, dass sich verschiedene Teilnehmer in einem UTM vernetzen und kollaborativ arbeiten können, ohne ihre Datenhoheit aufgeben zu müssen. In Zeiten, in denen Daten als das Öl des 21. Jahrhunderts beschrieben werden, ist der Bestand der Datenhoheit besonders wichtig für den Erfolg eines Systems mit vielen Stakeholdern.
Die Blockchain-Infrastruktur gilt außerdem als revisionssicher und bietet somit die Möglichkeit einen revisionssicheren SORA-Prozess in ein funktionales UTM zu integrieren. Dies wird Voraussetzung sein, für eine behördliche Anerkennung und Konformität.
Cloud-Computing
Mit der Auslagerung der Prozesse in die Cloud, können die Vorteile dieser skalierbaren, bedarfsorientierten und sicheren Technologie genutzt werden. Diese Flexibilität wird für viele Unternehmen mit der ansteigenden Datenmenge immer relevanter. Entsprechend den Angaben des IBM Reports “10 Key Marketing Trends For 2017” wurden allein in den letzten zwei Jahren 90% der vorhandenen Datenmenge erschaffen. Davon liegen ca. 52% in externen Großrechenzentren, in der Cloud. Für den Betrieb eines UTM, mit allen Prozessen und Stakeholdern, entstehen ebenfalls große Datenmengen. Dies sind z.B. Luftraumdaten, Verkehrsdaten, Wetterdaten und Infrastrukturdaten, für den bodenbezogenen Luftraum. Cloud-Computing ermöglicht es skalierbar diese Datenquellen zu integrieren und zu prozessieren.
Edge Computing
Edge Computing beschreibt das Konzept, mehr Datenprozessierung auf Endgeräten durchzuführen. Das reduziert das zu übertragende Datenvolumen und erhöht damit deutlich die Übertragungsgeschwindigkeit (Low Latency). Die Technologie wird vor allem für die Kommunikation zwischen der Ground Station (Bodenstation) und dem UAV notwendig sein. Dabei ist es wichtig, dass Daten von der Ground Station in Millisekunden zum UAV, dem Piloten oder anderen Clients gelangen, um z.B. Änderungen der Flugroute vornehmen zu können. Stellt man sich vor, dass eine Drohne bei einer Geschwindigkeit von 43km/h rund 12m je Sekunde zurücklegt, versteht man die Notwendigkeit in Millisekunden arbeiten zu müssen. Dies gilt vor allem für den Einsatz im urbanen Raum. Auf Basis der Geodaten und der künstlichen Intelligenz kann das System selbstständig eine Anpassung der Navigation vornehmen und die Information an alle Beteiligten weiterleiten und dokumentieren. Das geschieht ohne menschliches Eingreifen.
Mesh Netzwerk
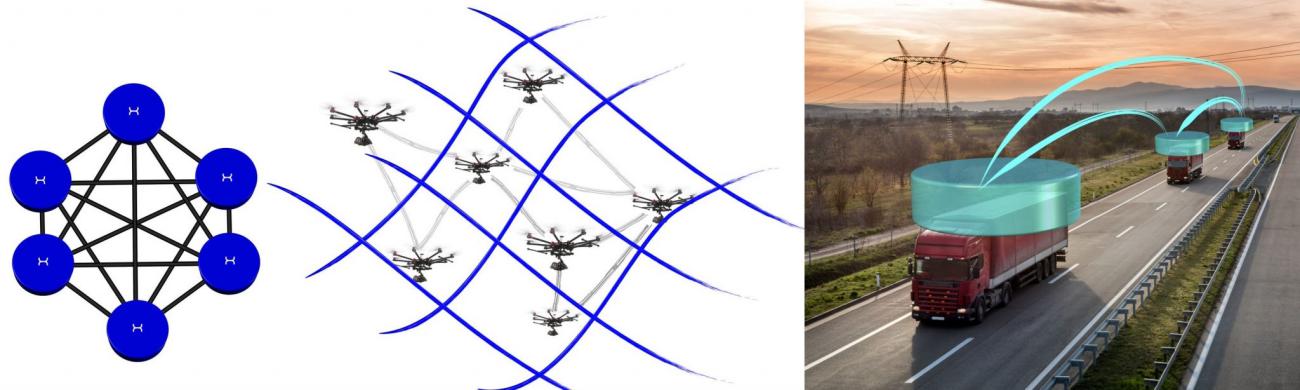
In einem Mesh-Netzwerk ist jeder Knotenpunkt (Endgerät) mit einem oder mehreren anderen Knotenpunkten vernetzt (siehe Bild erstes v.l.). Die Weitergabe erfolgt über die einzelnen Knoten bis zum Zielpunkt. Mesh-Netzwerke gelten als sehr sicher, da sie selbst bei Wegfall einzelner Knotenpunkte weiterhin funktionieren, sie sind selbstheilend. Damit bietet es die Voraussetzung für eine sichere und zuverlässige Kommunikation zwischen Drohnen (siehe Bild mitte). Eingepflegte Daten können in Millisekunden an die betreffenden Drohnen verteilt und auf der Onboard-Unit verarbeitet werden. Diese automatisierte und sehr schnelle Kommunikation zwischen Drohnen verhindert deren Zusammenstöße und macht Sense & Avoid Technologien grundsätzlich überflüssig. Diese werden jedoch voraussichtlich weiterhin als redundantes System Bestand haben. In Pilotversuchen wird die Technologie bereits beim sogenannten Platooning eingesetzt, wie im Bild rechts dargestellt. Dabei fahren Fahrzeuge in Kolonne dicht hintereinander und kommunizieren über ein Mesh-Netzwerk untereinander. Sie regeln selbständig den Abstand und führen Fahrmanöver durch.
Artificial Intelligence
Mit Hilfe künstlicher Intelligenz lassen sich in kürzester Zeit große Datenmengen verarbeiten und auf deren Basis automatisiert Entscheidungen treffen. Das System versteht situationsbedingt, welche Informationen an welchen Teilnehmer im UTM (Drohne, Pilot, Flugaufsicht, Behörden, u.v.m.) bereitgestellt werden müssen. So wird ein System in der Lage sein müssen, aufgrund der bereitgestellten Daten, die Flugrouten festzulegen. Dies hat in Abstimmung mit allen anderen Teilnehmern im Luftraum und unter Einbeziehung der Auflagen bodengebundener Infrastruktur zu erfolgen. Aufgrund der Vielzahl und Komplexität wird ein Großteil der Genehmigungsverfahren automatisiert ablaufen. Nur so lässt sich die Anzahl von regulierten Drohnenmissionen in Zukunft für vielfältigste Anwendungsfälle koordinieren. Künstliche Intelligenz wird eine wesentliche Voraussetzung sein, für die Kommunikation zwischen Drohnen. Diese müssen bei Unregelmäßigkeiten in Millisekunden auf Veränderungen reagieren und entsprechend der Informationen anderer UAVs die eigene Flugroute anpassen können.
Die amerikanische Luftaufsichtsbehörde FAA hat mit dem LAANC (Low Altitude Authorization and Notification Capability) Projekt ein erstes teilautomatisiertes System für die Integration von UAVs in den Luftraum geschaffen. Firmen wie SkyWard oder AIRMAP haben das System der FAA in ihren Applikationen integriert und können für die eingebundenen Gebiete im System automatisiert Aufstiegsgenehmigungen beantragen. Für bestimmte Risikoklassen erfolgt dann eine automatisierte Genehmigung, sofern alle Daten validiert sind.

Technologien in der Anwendung
Ein Beispiel für die erfolgreiche Integration einiger der vorgestellten Technologien, ist der von WPS – Workplace Solutions GmbH und der FlyNex GmbH entwickelte Leitstandtisch für Drohnen. Wie auf den Bildern zu sehen, können über einen großen Touchscreen-Tisch auf Basis der FlyNex-Kartendaten Drohnen in Echtzeit gesteuert werden. Über den Leitstandtisch können Einsätze geplant und die gesamte Mission live überwacht werden. Ein Eingreifen ist dabei jederzeit mit einem einfachen Fingerklick möglich. Die Sensoren an der Drohne nehmen die Messdaten auf und senden diese ebenfalls direkt an den Bediener. Das System wurde bereits real eingesetzt und kann für die Unternehmensintegration von unbemannten Luftfahrtsystemen bestellt werden.

Euer FlyNex Team







