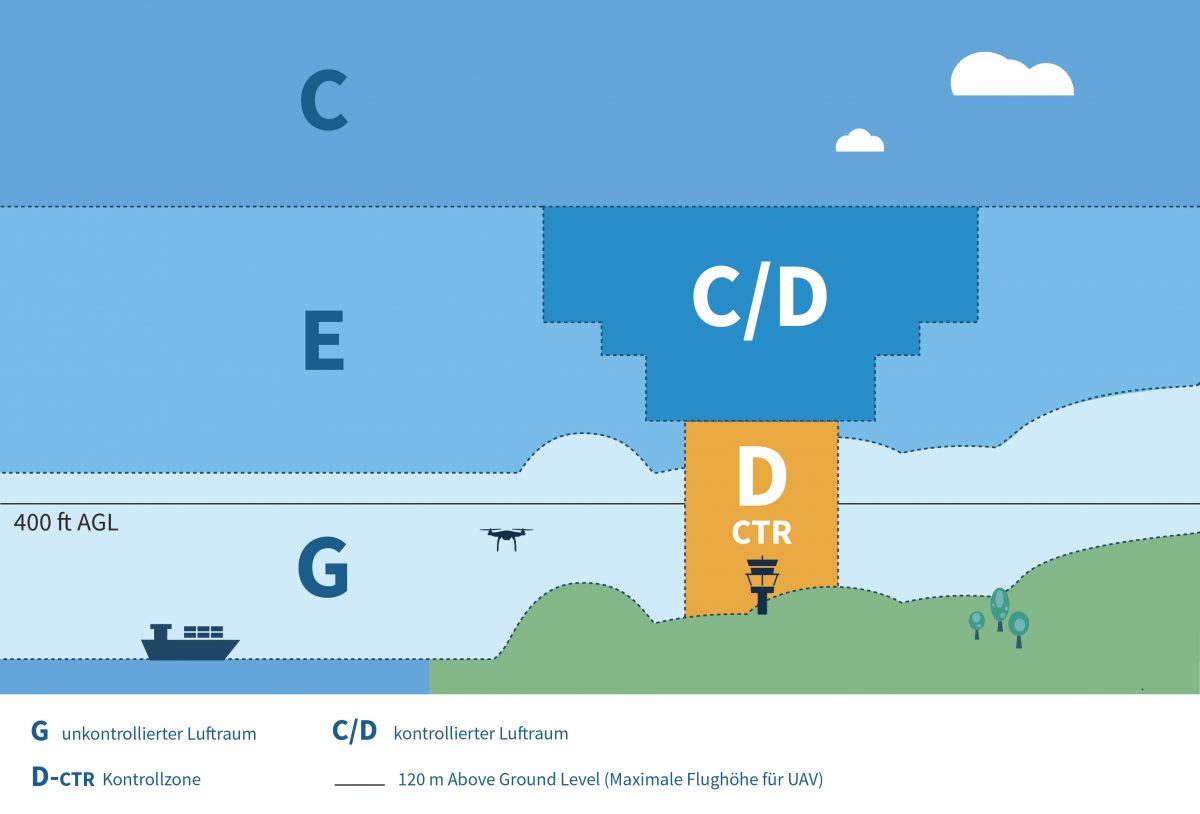
Mit bloßem Auge zwar nicht immer ersichtlich, aber auch im Himmel ist wenig Platz. Der sogenannte VFR-Flugverkehr (Visual Flight Rules), Personal Air Vehicles (PAV), Cargo-UAS, Fallschirmspringer, Wetterballons und Rettungshubschrauber: Sie alle fliegen im sogenannten Luftraum G (Golf). Das ist ein unkontrollierter Luftraum, der von der Erdoberfläche bis 2500ft (ca. 762 m) in die Höhe reicht.
FlyNex, das Deutsche Zentrum für Luft- und Raumfahrt (DLR) und weitere Partner entwickeln im Rahmen des Projektes City-ATM ein Konzept, um eine reibungslose Integration neuerer Verkehrsteilnehmer, also insbesondere Drohnen, in diesem Luftraum zu ermöglichen. Ziel des Projektes ist es, allen Verkehrsteilnehmern in der Luft einen sicheren Flug zu erlauben, sich simultan darin zu bewegen, ohne sich gegenseitig zu behindern oder zu kollidieren.
Nach den ersten erfolgreichen Testflügen an der Köhlbrandbrücke in Hamburg in Phase 1 im Jahr 2019, konnten dieses Jahr in Cochstedt am Nationalen Erprobungszentrum weitere Tests für Phase 2 des Projektes durchgeführt werden.
Im unkontrollierten Luftraum G sind, anders als in anderen Lufträumen, die Hindernisse auf der Erdoberfläche beim Flug zusätzlich zu berücksichtigen. In Phase 2 in Cochstedt wurde deshalb ein Verfahren getestet, in dem Drohnen sich gegenseitig auf plötzlich eintretende Gefahren oder Hindernisse selbstständig aufmerksam machen.
Kein Pilot mehr nötig
Auf dem Testgebiet wurden mehrere UAVs mit verschiedenen Flugmustern gleichzeitig betrieben. Mithilfe einer Rauchbombe wurde ein Feuer simuliert, das von einer Drohne entdeckt wurde. Ein Bodensystem der Drohnen erfasste die Gefahr und erzeugte eine künstliche Barriere um die Gefahrenstelle. Die Barriere, auch Dynamic Geofences genannt, wurde auf einen zentralen FlyNex-Server übertragen, der hier als U-Space Service Provider fungierte.
Die Bodenstationen wurden so von FlyNex als Network Service Provider, bzw. Drohnenmanagement-Plattform, über die neue Ad-hoc-Flugverbotszone informiert. Über die Drohnensoftware fand eine Übermittlung der Informationen auf die Systeme der einzelnen Drohnen statt. Eine der Drohnen erkannte somit selbstständig, dass sie sich gerade in der Flugverbotszone befand. Das UAV hielt seine Position in der Luft und wartete auf weitere Anweisungen des Betreibers. Diese Art der Kommunikation soll andere Drohnen zukünftig vor Gefahren und Hindernissen warnen, letztlich aber auch einen sicheren, organisierten und koordinierten Verkehr in der Luft gewährleisten.
Die Tests in Cochstedt sind erfolgreich verlaufen. Zu den Projektbeteiligten gehören DFS, Kopterkraft, Auterion, NXP, FlyNex sowie das Zentrum für Angewandte Luftfahrtforschung und die Gesellschaft für Luftverkehrsinformatik (ZAL).
Weitere Informationen finden Sie auch auf der Seite des DLR unter https://www.dlr.de/fl/desktopdefault.aspx/tabid-1149/1737_read-50670/
Das Projekt City-ATM soll insbesondere die Verwirklichung des U-Space-Konzepts der EASA fördern. Ziel des U-Space ist die Einbindung einer Vielzahl von Drohnen in den europäischen Luftraum. Dabei wird eine hohe Automatisierung von Prozessen und Konnektivität zwischen Drohne und Umwelt angestrebt. Wie sich das gestaltet und vor allem welche neuen Möglichkeiten sich dabei für Unternehmen und die Wirtschaft ergeben, ist im White Paper “U-Space“ beschrieben und visualisiert.
Wir wünschen gute Flüge,
Ihr FlyNex Team